
KC-HBRP耐高温补偿导线值得信任
KC-HBRP耐高温补偿导线值得信任KC-HBRP耐高温补偿导线电容两端和公共点之间分辨测电阻,一般阻值大的是副绕组,阻值小的是主绕组。电容两端切换实现正反转那么该用电阻档的哪个量程呢?电阻的公式R=ρl/sρ是电阻率,L是材料长度,单位为米,S是截面积,算出来的结果单位为Ω。从公式可以看出在相同的条件下,截面积越大阻值越小,大电机绕组的铜丝粗一点,但是电阻其实不大,十几欧姆左右,有的甚至几欧姆。小电机绕组的电阻相对大一点,有的小电机功率才几十瓦,可是绕组的阻值却几百欧姆,如果是铝线的那阻值更高,几千欧姆也正常。
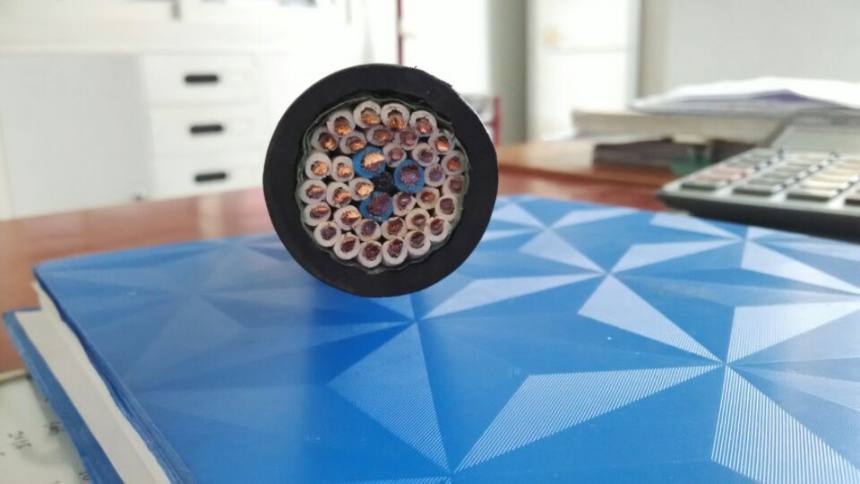
ZRC-DJYVPR ZRC-DJYPVR计算机电缆
【简单介绍】
ZRC-DJYVPR ZRC-DJYPVR计算机电缆适用于电子计算机系统、监控回路,发电、冶金、石化等工矿企业,高温场合下集散系统、自动化系统的信号传输及检测仪器、仪表等连接用多对屏蔽电缆。
【详细说明】

图片关键词

一、ZRC-DJYVPR ZRC-DJYPVR计算机电缆执行标准
 二、ZRC-DJYVPR ZRC-DJYPVR计算机电缆使用特性
二、ZRC-DJYVPR ZRC-DJYPVR计算机电缆使用特性&nbs 0V
工作温度: 一般型不超过70℃
交联聚乙不超过90℃
耐热105℃的不超过105℃
氟塑料绝缘不超过200℃和260℃ 环境温度: 固定敷设-40℃、非固定敷设-15℃
弯曲半径: 无铠装层电缆应不小于电缆外径的6倍
带铠装层电缆应不小于电缆外径的12倍
三、ZRC-DJYVPR ZRC-DJYPVR计算机电缆型号名称
型号 名称
KC-HBRP耐高温补偿导线值得信任KC-HBRP耐高温补偿导线则:Vt=V0+(V1-V0)×[1-e(-t/RC)]或t=RC×Ln[(V1-V0)/(V1-Vt)],电压为E的电池通过R向初值为0的电容C充电,V0=0,V1=E,故充到t时刻电容上的电压为:Vt=E×[1-e(-t/RC)]再如,初始电压为E的电容C通过R放电,V0=E,V1=0,故放到t时刻电容上的电压为:Vt=E×e(-t/RC)又如,初值为1/3Vcc的电容C通过R充电,充电终值为Vcc,问充到2/3Vcc需要的时间是多少?V0=Vcc/3,V1=Vcc,Vt=2*Vcc/3,故t=RC×Ln[(1-1/3)/(1-2/3)]=RC×Ln2=0.693RC注:Ln()是e为底的对数函数一个恒流充放电的常用公式:⊿Vc=I*⊿t/C.再一个电容充电的常用公式:Vc=E(1-e(-t/R*C))。
聚乙绝缘聚氯乙护套计算机电缆
DJYPV 铜芯聚乙绝缘铜丝编织分屏蔽聚氯乙护套电子计算机电缆
DJYPVP 铜芯聚乙绝缘铜丝编织分屏蔽铜丝编织总屏蔽聚氯乙护套电子计算机电缆
DJYVP 铜芯聚乙绝缘铜丝编织总屏蔽聚氯乙护套电子计算机电缆
DJYP2V 铜芯聚乙绝缘铜带分屏蔽聚氯乙护套电子计算机电缆
DJYP2VP2 铜芯聚乙绝缘铜带分屏蔽及铜带总屏蔽聚氯乙护套电子计算机电缆
DJYVP2 铜芯聚乙绝缘铜带总屏蔽聚氯乙护套电子计算机电缆
DJYP3V 铜芯聚乙绝缘铝箔/塑料薄膜复合带分屏蔽聚氯乙护套电子计算机电缆
DJYP3VP3 铜芯聚乙绝缘铝箔/塑料薄膜复合带分屏蔽及铝箔/塑料薄膜复合带总屏蔽聚氯乙护套电子计算机电缆
DJYVP3 铜芯聚乙绝缘铝箔/塑料薄膜复合带总屏蔽聚氯乙护套电子计算机电缆
DJYPV22 铜芯聚乙绝缘铜丝编织分屏蔽钢带铠装聚氯乙护套电子计算机电缆
DJYPVP22 铜芯聚乙绝缘铜丝编织分屏蔽及铜丝编织总屏蔽钢带铠装聚氯乙护套电子计算机电缆
DJYVP22 铜芯聚乙绝缘铜丝编织总屏蔽钢带铠装聚氯乙护套电子计算机电缆
DJYP2VP2-22 铜芯聚乙绝缘铜带总屏蔽钢带铠装聚氯乙护套电子计算机电缆
DJYVP2-22 铜芯聚乙绝缘铜带分屏蔽及铜带总屏蔽钢带铠装聚氯乙护套电子计算机电缆
DJYP3V22 铜芯聚乙绝缘铝箔/塑料薄膜复合带分屏蔽钢带铠装聚氯乙护套电子计算机电缆
DJYP3VP3-22 铜芯聚乙绝缘铝箔/塑料薄膜复合带分屏蔽及铝箔/塑料薄膜复合带总屏蔽钢带铠装聚氯乙护套电子计算机电缆
KC-HBRP耐高温补偿导线值得信任KC-HBRP耐高温补偿导线步进电机的线圈通直流电时,带负载转子的电磁转矩(与负载转矩平衡而产生的恢复电磁转矩称为静态转矩或静止转矩)与转子功率角的关系称为角度-静止转矩特性,这就是电机的静态特性。如下图所示:因为转子为永磁体,产生的气隙磁密为正弦分布,所以理论上静止转矩曲线为正弦波。此角度-静止转矩特性为步进电机产生电磁转矩能力的重要指标,转矩越大越好,转矩波形越接近正弦越好。实际上磁极下存在齿槽转矩,使转矩发生畸变,如两相电机的齿槽转矩为静止转矩角度周期的4倍谐波,加在正弦的静止转矩上,则上图所示的转矩为:TL=TMsin[(θL/θM)π/2]其中TL与TM各表示负载转矩和静止转矩(或称把持转矩),相对应的功率角为θL和θM,此位移角的变化决定了步进电机位置精度。